※この記事は公開から時間が経っているため、現在の環境とは内容が異なる場合があります。
ラズベリーパイ(Raspberry Pi Zero WH)で電子工作を始めるには、本体や電源ケーブルだけでなく、LEDや抵抗、ブレッドボードなどの電子部品も必要になります。
この記事では、ラズベリーパイで電子工作を試すときに使う電子部品やパーツを、初心者向けに紹介します。
ラズベリーパイ本体、microSDカード、電源ケーブル、ケースなどの機材については、こちらの記事にまとめています。

まず用意したい電子部品
はじめて電子工作を試すなら、まずは次のあたりをそろえておくと進めやすいです。
- ブレッドボード
- ジャンパーワイヤー
- LED
- 抵抗
- タクトスイッチ
- RGBフルカラーLED
最初からたくさんの部品をそろえる必要はありません。
まずは、LEDを1つ光らせるために必要な部品から始めると、配線やGPIOの使い方を理解しやすいです。
パーツを一つずつ選ぶのが大変な場合は、初心者向けの電子工作キットを使うのも便利です。
ブレッドボード、LED、抵抗、ジャンパーワイヤーなどがまとめて入っているものなら、最初の実験に使いやすいです。

ブレッドボード
ブレッドボードは、はんだ付けをしなくても、穴に電子部品やジャンパーワイヤーを挿すだけで配線できるボードです。
電子工作では、いきなり部品をはんだ付けして固定するのではなく、まずブレッドボード上で動作を確認することが多いです。
配線を間違えても差し替えやすいので、初心者でも試しやすい道具です。
サンハヤトのブレッドボード
ブレッドボードは、品質が安定しているものを選ぶと安心です。
接触不良があると、プログラムや配線が正しくても動かないことがあります。そうなると、原因の切り分けがかなり大変です。
予算に余裕があれば、信頼できるメーカーのブレッドボードを選ぶと、余計なトラブルを減らしやすいです。

価格を抑えたブレッドボード
価格を抑えたブレッドボードもあります。
ただ、ものによっては接触が不安定だったり、内部でうまくつながっていなかったりすることがあります。
安いものを使う場合は、「断線しているかもしれない」「接触が甘いかもしれない」と考えながら確認すると安心です。

はじめはこちらを使っていましたが、途中から接触不良に……。
結局、上のサンハヤトのブレッドボードを買いなおしました。
ミニブレッドボード
もう一つ、小さな工作で便利なのが、このミニブレッドボードです。
小型で扱いやすく、LEDやセンサーを少し試すくらいなら十分使えます。
机の上でも場所を取りにくいので、ちょっとした確認や小さな回路に向いています。

ブレッドボード内の配線
ブレッドボードは、穴がただ並んでいるだけではありません。
内部では、同じ列や電源ラインがつながっています。
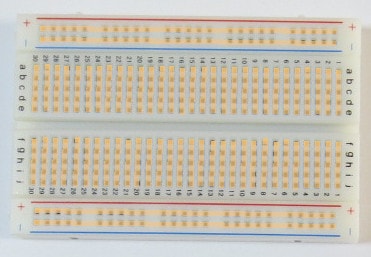
このつながりを理解しておくと、どこに部品を挿せばよいか、どこにジャンパーワイヤーをつなげばよいかがわかりやすくなります。
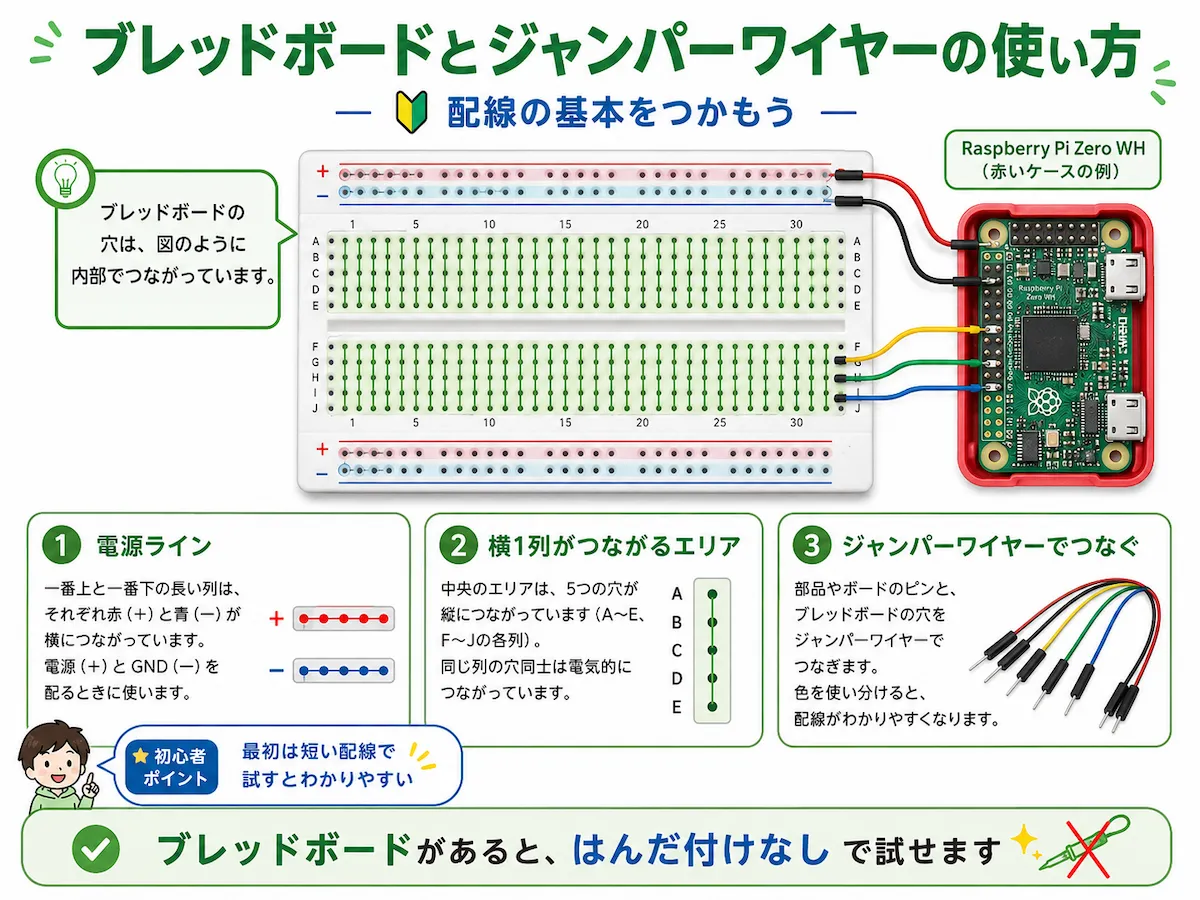
ブレッドボードの基本は、次の3つです。
- 上下の長いラインは、電源やGNDの配線に使う
- 中央のエリアは、同じ横列の穴が内部でつながっている
- 部品やラズベリーパイとは、ジャンパーワイヤーで接続する
最初は、短い配線で小さな回路を作ると確認しやすいです。
ジャンパーワイヤー
ジャンパーワイヤーは、ラズベリーパイ、ブレッドボード、電子部品をつなぐための配線です。

ラズベリーパイのGPIOピンとブレッドボードをつないだり、ブレッドボード上で部品同士をつないだりするときに使います。
20cmのジャンパーワイヤーセット
ラズベリーパイとブレッドボードをつなぐなら、少し長めのジャンパーワイヤーがあると便利です。
オス-メス、オス-オス、メス-メスのセットがあると、使える場面が増えます。

短いジャンパーワイヤーセット
ブレッドボード上の配線には、短いジャンパーワイヤーも便利です。
長い線ばかりだと、回路がごちゃごちゃして確認しにくくなります。
短い線を使うと、ブレッドボード上の配線がすっきりします。

LED
LED(発光ダイオード)は、電流を流すと光る部品です。
ラズベリーパイの電子工作では、最初に試しやすい部品のひとつです。

プログラムからGPIOを操作してLEDを点灯させると、「プログラムで電子部品を動かしている」ことが目で見てわかります。
LEDのプラスとマイナス
LEDには向きがあります。
長い足がプラス側のアノード、短い足がマイナス側のカソードです。
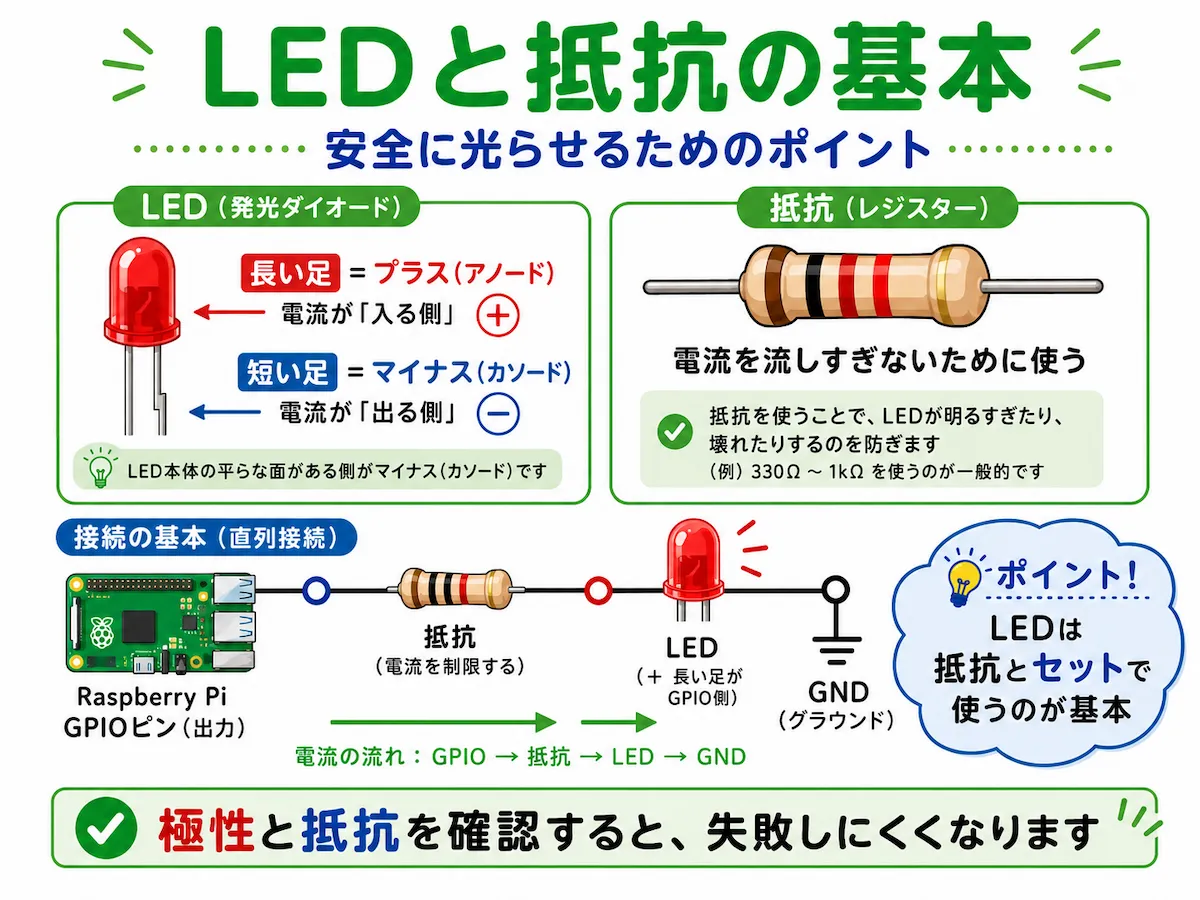
基本的には、プラス側から電流を入れて、マイナス側へ流します。
LED本体の平らな面がある側も、マイナス側を見分ける目印になります。
赤色LED
最初に試すなら、赤色LEDなどのシンプルなLEDで十分です。
本サイトでは、秋月電子通商で購入した3mmの赤色LEDを使っています。

LEDの色やサイズはいろいろありますが、まずは1色のLEDを使って、点灯・消灯を確認するところから始めるとわかりやすいです。
LEDは抵抗とセットで使う
LEDを直接つなぐと、電流が流れすぎてLEDやラズベリーパイを壊してしまう可能性があります。
そのため、LEDを使うときは抵抗も一緒に使うのが基本です。
電流の流れは、たとえば次のようになります。
GPIO → 抵抗 → LED → GND抵抗を入れることで、LEDに流れる電流を制限できます。
最初は、LEDと抵抗をセットで使うと覚えておくと安心です。
LEDの足をカットする
LEDの足は長いので、そのままだと隣の部品や配線に触れてしまうことがあります。
ショートを防ぐためにも、必要に応じてニッパーでカットします。

カットするときは、プラス側とマイナス側がわからなくならないように、少しだけ長さを変えておくと見分けやすいです。
抵抗
抵抗は、電流を調整するために使う部品です。
LEDを光らせるときは、電流が流れすぎないように抵抗を入れます。
抵抗にはプラス・マイナスの向きはありません。
こちらもLEDと同様、長すぎる端子はカットして使用します。
抵抗値の見方
抵抗には色の帯が付いていて、この色で抵抗値がわかります。
色の帯を暗記する必要はありません。
 うさたん
うさたんなんか模様がついてる!
 まある
まあるこの色の帯で、抵抗の大きさが分かるよ
早見表を見ながら確認すれば大丈夫
さまざまな大きさの抵抗があり、回路によって計算して使い分けます。
最初のうちは、抵抗カラーコードの早見表や計算ツールを見ながら確認すれば大丈夫です。
抵抗は、1種類だけを大量に買うより、いくつかの抵抗値が入ったセットのほうが使いやすいと思います。

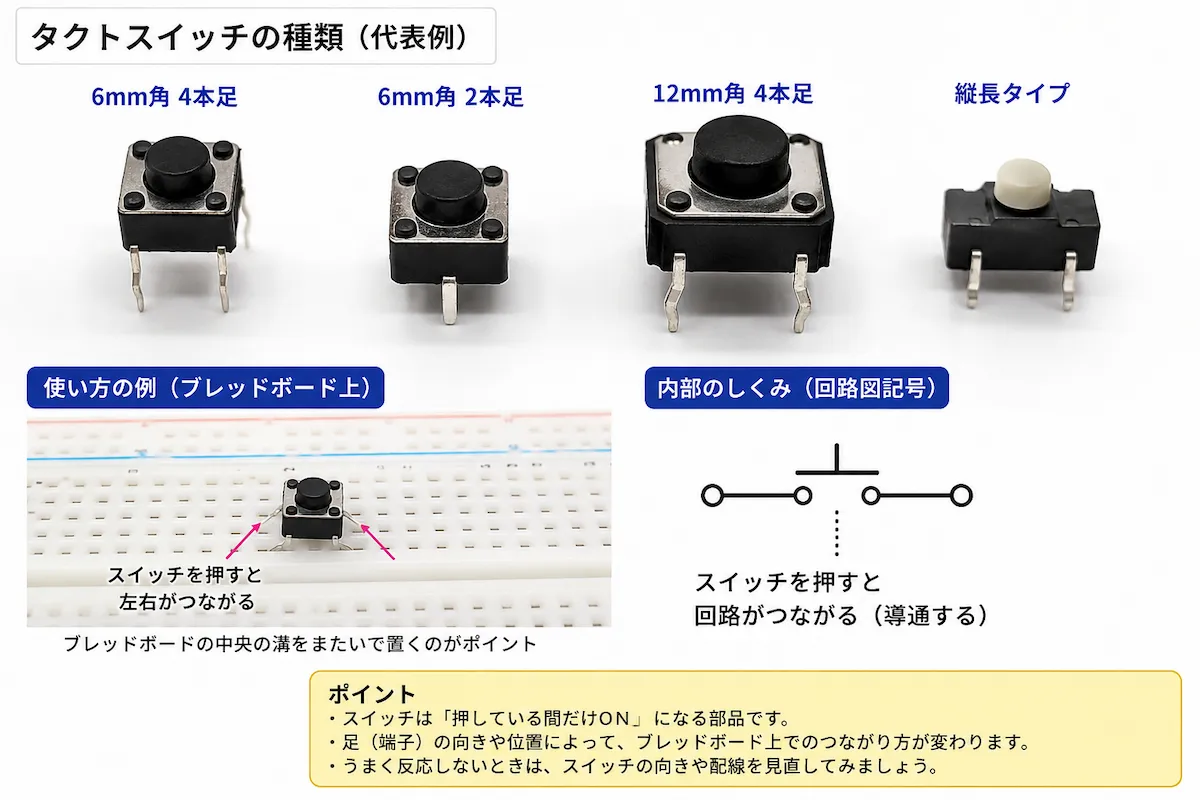
タクトスイッチ
タクトスイッチは、押している間だけONになる小さなスイッチです。
ボタンを押したらLEDを光らせる、ボタンを押したらプログラムを動かす、といった入力に使えます。
スイッチを使うと、ラズベリーパイに「人が操作した」という入力を送れるようになります。
初心者向けの実験では、LEDと並んでよく使う部品です。
タクトスイッチは、押していないときは回路が切れていて、押している間だけ内部がつながります。
ただし、足の向きやブレッドボードへの挿し方によって、つながり方が変わります。
うまく反応しないときは、プログラムだけでなく、スイッチの向きや配線も確認してみてください。
最初は、ブレッドボードの中央の溝をまたぐように置くと確認しやすいです。
RGBフルカラーLED
RGBフルカラーLEDは、1つのLEDの中に赤・緑・青のLEDチップが入っている部品です。
こちらの写真のLEDは、7色に光る5mmのフルカラーLEDです。

赤、緑、青の光を組み合わせることで、いろいろな色を表現できます。
こちらは、光の3原色です。
ON・OFFだけでも、赤、緑、青、黄色、水色、マゼンタ、白などを表現できます。
この図のようにON・OFFだけだと7色、中間色も出力できると、多くの色を表現することができます。
さらに明るさを細かく調整できると、より多くの色を作れます。
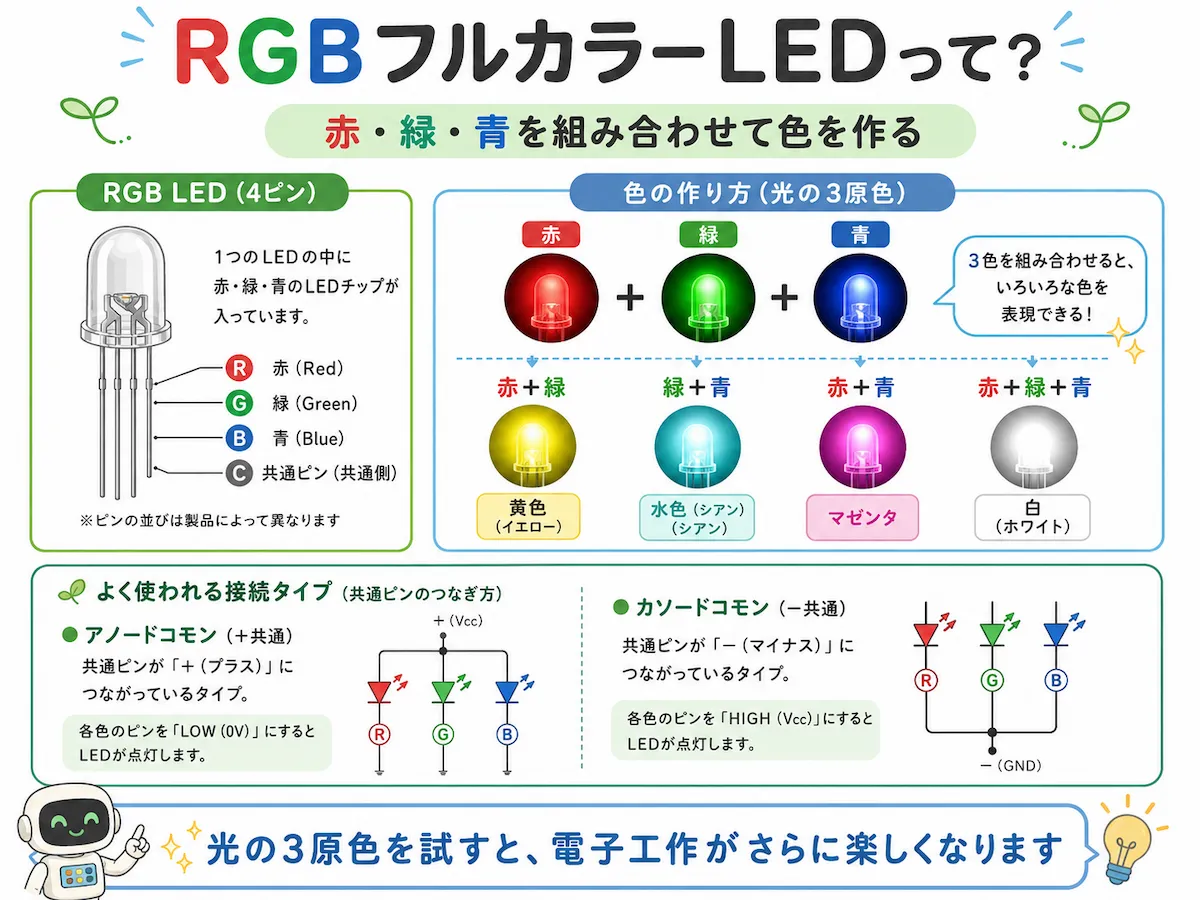
アノードコモンとカソードコモン
フルカラーLEDには、主に次の2種類があります。
- アノードコモン:プラス側が共通
- カソードコモン:マイナス側が共通
使うLEDがどちらのタイプかによって、GPIOからの制御方法が変わります。
カソードコモンの場合は、GPIOをHIGHにすると点灯します。
アノードコモンの場合は、GPIOをLOWにすると点灯します。
製品によってピンの並びも違うことがあるため、使う前にデータシートや商品ページを確認すると安心です。
LED光拡散キャップ
LEDに光拡散キャップをつけると、光がやわらかく広がって見えます。

そのままのLEDは光が一点に強く見えることがありますが、キャップを付けると見た目が少しやさしくなります。
フォトリフレクタ(反射型フォトセンサ)
フォトリフレクタは光の反射を使って、近くにある物の有無や位置、色などを検知できるセンサーです。
たとえば、ロボットが床の線を読む、物が近づいたことを検知する、といった使い方ができます。
詳しい使い方はこちらの記事で紹介しています。
7セグメントLED
7セグメントLEDは、数字を表示するための部品です。
こちらの写真の小型3桁青色7セグメントLED表示器 7mm高 アノードコモン アノード共通接続 は、きれいな色で数字が表現できる表示器です。
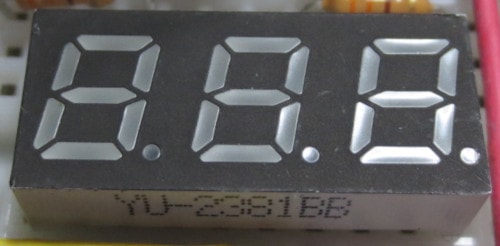
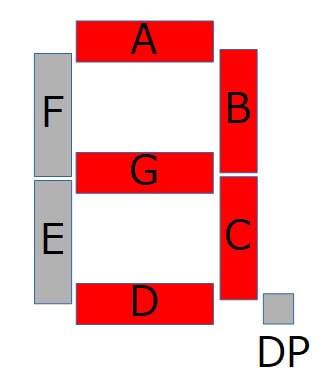
7つのバーと小数点用のLEDを組み合わせて、数字を表現します。
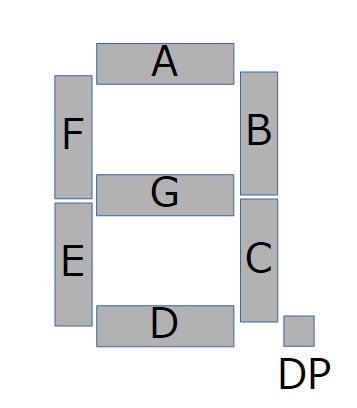
たとえば、数字の「3」を表示する場合は、A、B、C、D、Gを点灯させます。
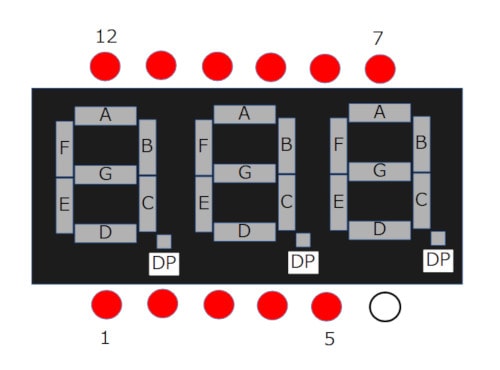
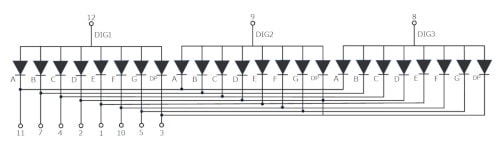
ピンの配列は、部品によって決まっています(6番のピンはとんでいてありません)。
内部の配線は、次のようになっています。
3桁の7セグメントLEDをそのまま表示すると、3桁とも同じ数字が出てしまいます。
そこで、1桁ずつ違う数字を高速に切り替えて表示し、人の目には3桁が同時に表示されているように見せます。
この方法を、ダイナミック点灯といいます。
7セグメントLEDにも、アノードコモンとカソードコモンがあります。
使用する部品に合わせて、点灯条件や配線を確認してください。
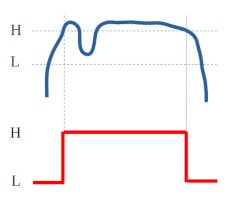
6回路シュミットトリガインバータ 74HC14
74HC14は、インバーターが6個入っているICです。
インバーターは、HIGHをLOWに、LOWをHIGHに変える回路です。
そのため、74HC14を通した信号は、入力と出力が反対になります。
この「信号が逆転する」点には注意が必要ですが、ゆらぎのある信号をHIGH/LOWのはっきりしたデジタル信号に整えることができます。
ただし、ADコンバータのようにアナログ値を数値として読み取る部品ではありません。
明るさや距離などの細かい変化を数値として扱いたい場合は、ADコンバータを使います。

シュミットトリガは、ゆらぎのある信号を、はっきりしたデジタル信号に整えるために使われます。
センサーの信号が不安定なときや、入力を安定させたいときに役立ちます。
74HC14のピン配列はこちらです。インバーター6個の接続が分かります。
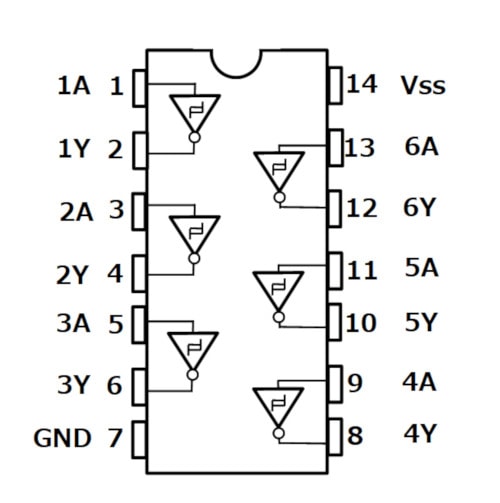
詳細はデータシートを参照してください。
ICは向きがあるので、切り欠きや印を確認して差し込みます。
動作が不安定になってしまうときは、しっかり奥までささっているか確認してください。
ADコンバータ MCP3002
ADコンバータは、アナログ信号をデジタル信号に変換するためのICです。

ラズベリーパイのGPIOは、基本的にデジタル信号を扱います。
そのため、明るさや距離など、連続的に変化するアナログ信号を読みたいときは、ADコンバータを使います。
ADコンバータを使うときは、Raspberry PiのSPI通信を利用します。
SPI(Serial Paripheral Interface)とは、少ない信号線で高速にデータの送受信ができる規格です。
ラズベリーパイでSPI通信を利用するには、以下のいずれかの方法でSPIを有効に設定する必要があります。
- GUIの画面のメニューから[設定]-[Raspberry Pi の設定]-[インターフェイス]タブで有効にする
- ターミナルで「sudo raspi-config」と入力して表示される設定画面で有効にするリスト
設定方法は環境によって変わることがあるため、実際に作業するときは使っているOSの画面や公式情報も確認してください。
MCP3002のピン配列はこちらです。
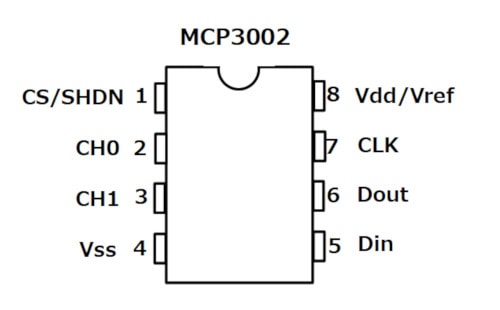
各ピンの名前とRaspberry Pi Zero WHへの接続先です。
SPI通信を利用する場合、ラズベリーパイに接続するGPIO番号が決まっています。
| No. | 名称 | 接続先 |
|---|---|---|
| 1 | CS/SHDN チップ・セレクト/CS | GPIO8(24) / GPIO7(26) |
| 2 | CH0 | アナログ信号入力1 |
| 3 | CH1 | アナログ信号入力2 |
| 4 | Vss | GND |
| 5 | Din データ出力 MOSI Master Out Slave In | GPIO10(19) |
| 6 | Dout データ入力 MISO Master In Slave Out | GPIO9(21) |
| 7 | CLK クロック SCLK Serial CLocK | GPIO11(23) |
| 8 | Vdd/Vref | 電源3.3V |
8ビットシフトレジスタ 74HC595
8ビットシフトレジスタは、少ないGPIOピンで複数の出力を扱うために使えるICです。
これを利用することでGPIOを節約することができます。

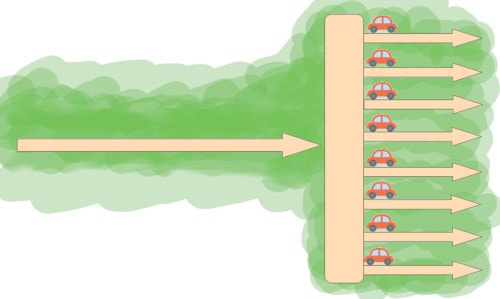
シリアルデータ入力をパラレル出力(1つのピンに入力した信号を、8つのピンに出力)することができます。
たとえば、1本道を走ってきた8台の車が、
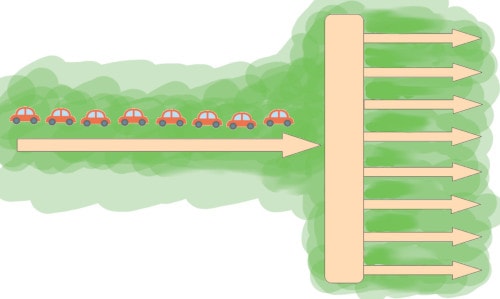
8本のコースの位置について、Go!で一斉に走り出すようなイメージです。
ピン配列はこちらです。
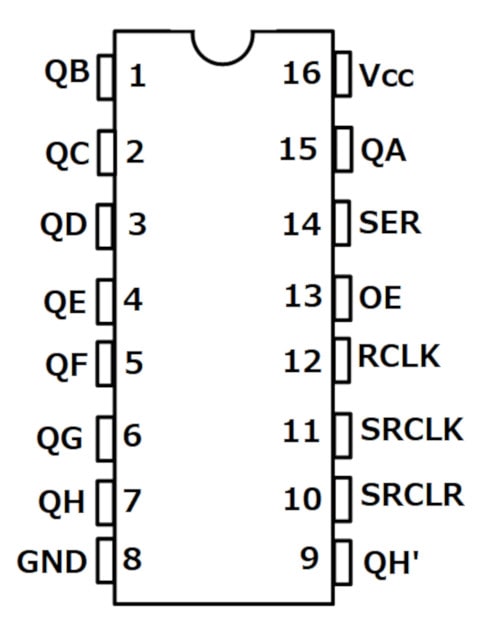
各ピンの名称と役割です。
| 1~7, 15 | QA~QH | パラレル出力 |
| 8 | GND | グランド |
| 9 | QH* | 直列に74HC595を接続する際に次の74HC595のSER端子に接続 |
| 10 | SRCLR | shift register clear Loのままクロックを送信すると、シフトレジスタの中身が全て0になる |
| 11 | SRCLK | shift register clock シフトレジスタクロック LOWからHIGHになるときに内部シフトレジスタをシフトし、最下位ビットにSERの内容を追加 |
| 12 | RCLK | strage register clock ラッチクロック ストレージレジスタのクロック信号 内部のシフトレジスタを実際に外の端子に出力 |
| 13 | OE | output enable 出力の有効化 GNDに接続する |
| 14 | SER | serial input シリアルデータ入力 |
| 16 | Vcc | 3.3V電源 |
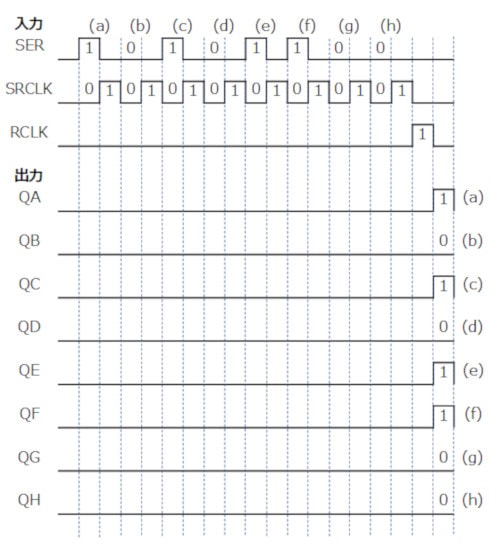
使用方法は、出力したい8ビットのデータを上位ビットからSERに入力します。
具体的には、SERにHIGH(1) or LOW(0)を入力し、SRCLKをLOW(0)からHIGH(1)に切り替えることで、1ビットのデータを入力できます。
これを8回繰り返します(8ビットのデータを送信)。
最後にRCLKを LOW(0)からHIGH(1)に切り替えると、1ビットずつQA~QHのピンに出力されます。
温湿度センサ DHT11
温湿度センサ(DHT11)は、温度と湿度を同時に測ることができるセンサーです。
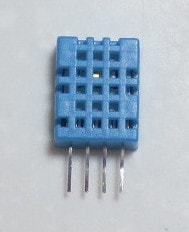
DHT11には4本のピンがあります。
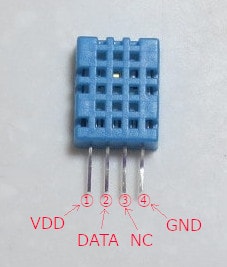
その構成は、左から
① VDD(3.3V~5.5Vの電圧を供給する)
② DATA(データ 4.7kΩのプルアップ抵抗が必要)
③ NC(Non-Connected = 非接続)
④ GND(グラウンドにつなぐ)
となっています。
プルアップ抵抗とは
信号入力がHIGHでもLOWでもない不安定な状態になると、誤動作の原因になることがあります。
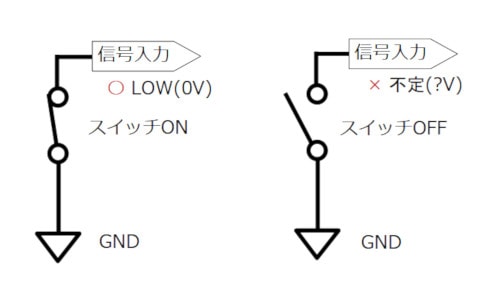
プルアップ抵抗は、信号を電源側に引き上げて、OFFのときでも状態を安定させるために使います。
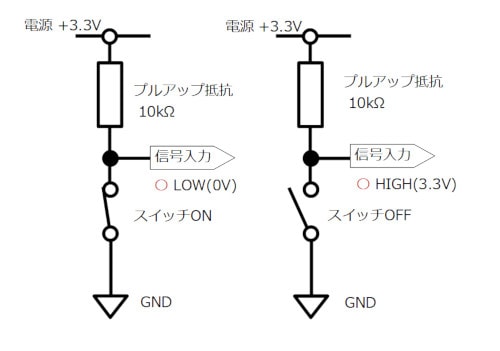
抵抗を入れずに電源とGNDが直接つながると、ショートしてしまいます。
そのため、プルアップ抵抗を入れて安全に信号を安定させます。
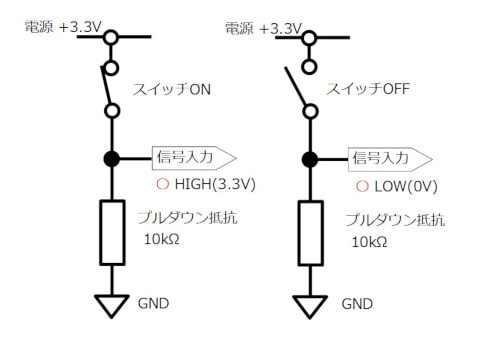
GND側に抵抗を入れて、信号をLOW側に安定させる方法は、プルダウン抵抗といいます。
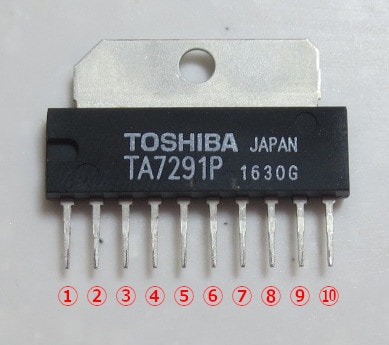
モータードライバ TA7291P
※この記事で使っているTA7291Pは、制作当時に使用していたモータードライバです。
公開から時間が経ったため、現在は入手しづらい場合があります。
これから購入する場合は、現在入手できるモータードライバの中から、使用するモーターの電圧・電流に合ったものを確認してください。
TA7291Pの代わりに使える候補として、TB6612FNG系やDRV8833系のモジュールもあります。
ただし、ピン配置や制御方法、対応できるモーターの電圧・電流は製品ごとに異なるため、購入前に仕様を確認してください。
モータードライバは、モーターの回転方向や回転速度を制御するためのICです。
モーターは、ラズベリーパイのGPIOから直接動かすには大きな電流が必要です。
そのため、モーターを動かすときは、モータードライバを使って、外部電源からモーターに電力を供給します。
モータードライバを使うと、
- モーターを正転させる
- モーターを逆転させる
- 回転速度を調整する
- ラズベリーパイとは別の電源でモーターを動かす
といったことができます。
各ピンの名称と役割です。
| TA7291P側 | Raspberry Pi側 |
| (1)GND | GND(Raspberry Piと外部電源共通) |
| (2)OUT1 | モーターの片方に接続 |
| (3)NC | 非接続 |
| (4)Vref | 制御電源 (使わない場合、10kΩの抵抗を経由して8ピンに接続) |
| (5)IN1 | GPIO (ON or PWM モーター正転) |
| (6)IN2 | GPIO (ON or PWM モーター反転) |
| (7)Vcc | ロジック側電源4.5~20V (外部電源のプラス) |
| (8)Vs | モーター用電源0~20V (外部電源のプラス) |
| (9)NC | 非接続 |
| (10)OUT2 | モータのもう一方に接続 |
モーターを扱うときは、ラズベリーパイ本体に大きな電流を流さないように注意します。
ラズベリーパイ用カメラモジュール
ラズベリーパイ用のカメラモジュールを使うと、写真や動画を撮影できます。
ロボットに取り付けると、ロボット目線の映像を確認できるようになります。

2592 x 1944ピクセルの静止画像、1080p / 30 fps といった動画撮影をサポート。画像・画質も十分で、接続用のコードも付属されています。
透明のアクリルケースホルダーは、こちらのYoutube動画を参考にしたら、簡単に組み立てられました。
コスパ◎で、とってもおすすめです。
カメラモジュールは、ロボットをスマホから操作する工作でも使用しています。

チェーンプログラムロボット
チェーンプログラムロボットは、プラモデルのように組み立てて動かせるロボットです。
電池を入れて動かします。
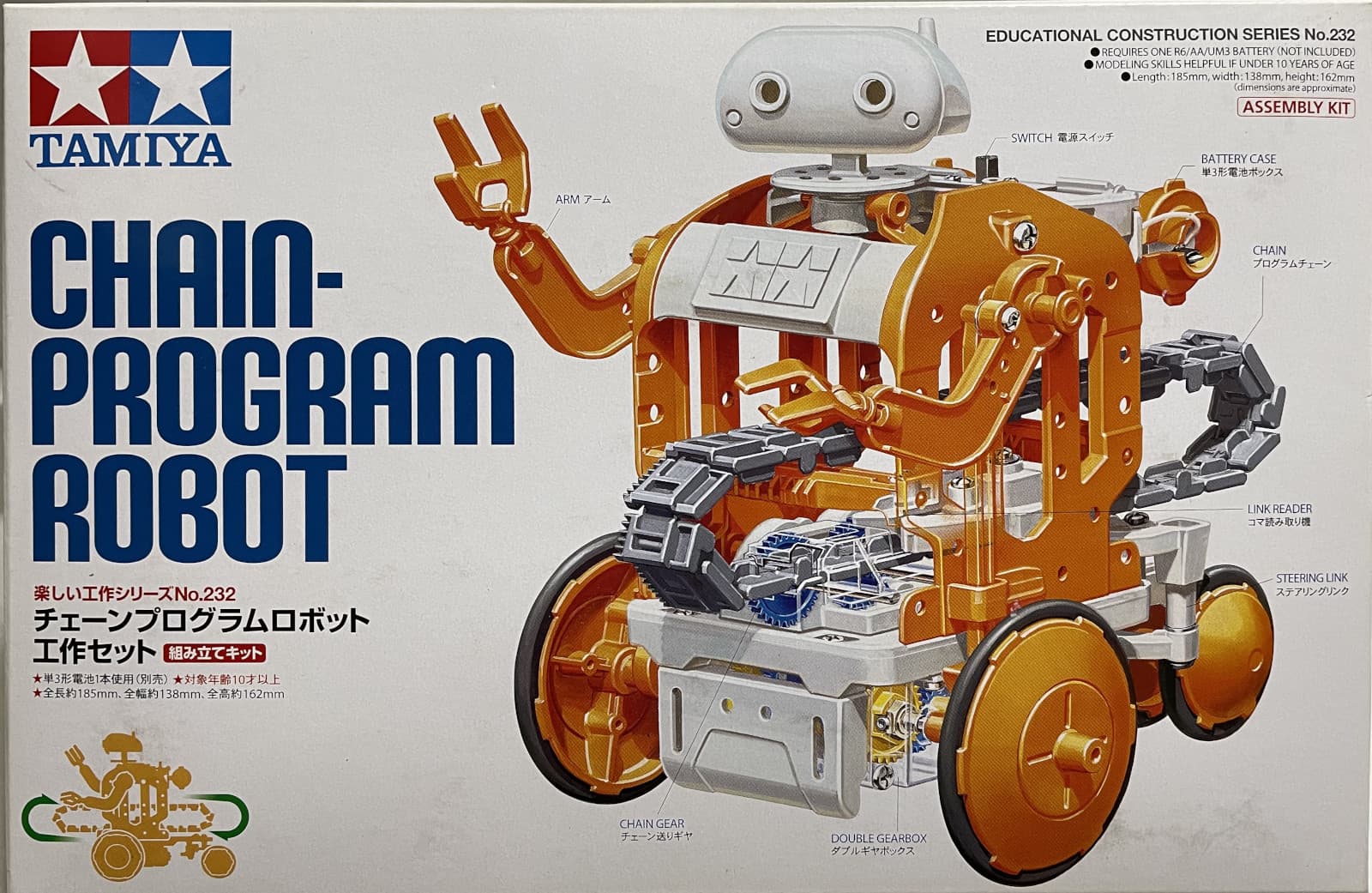
付属のグレーのチェーンを組み合わせることで、「前進」、「右カーブ」、「左カーブ」といった動きをプログラムできます。
規則的に小さな穴が開いていて、パーツの組み換えも簡単なので、必要に応じたカスタマイズができます。
このロボットを使って、ラズベリーパイから操作する工作に使っています。

ユニバーサルプレート
ユニバーサルプレートは、ロボットや電子部品を取り付ける土台として使える工作用プレートです。
穴がたくさん開いているので、ねじやパーツを取り付けやすく、工作の幅が広がります。
好きな大きさでカットできるのに丈夫で、接続用のパーツもあるユニバーサルプレートは、簡単に工作ができるのでとても便利です。
上で紹介したチェーンプログラムロボットをカスタマイズするときにも使っています。
こちらの商品は透明なので他のパーツと色が喧嘩しないので、使いやすいです。
こちらもおすすめです。

まとめ
ラズベリーパイで電子工作を始めるときは、まず基本の電子部品からそろえると進めやすいです。
最初に用意したいのは、次のような部品です。
- ブレッドボード
- ジャンパーワイヤー
- LED
- 抵抗
- タクトスイッチ
- RGBフルカラーLED
このあたりがあれば、LEDを光らせたり、ボタン入力を試したり、簡単な回路を作ったりできます。
慣れてきたら、センサー、7セグメントLED、ADコンバータ、シフトレジスタ、モータードライバなどを使うことで、できることが広がっていきます。
電子部品は、最初は少し難しく見えるかもしれません。
でも、1つずつ役割を確認しながら使っていくと、少しずつ回路の意味が見えてきます。
まずは、ブレッドボードにLEDと抵抗を挿して、1つ光らせるところから始めるのがおすすめです。
ラズベリーパイ本体や電源ケーブルなど、電子工作に必要な機材はこちらの記事にまとめています。
次は、Raspberry Pi Zero WHを使えるように初期設定をしていきます。

ラズベリーパイの概要はこちらです。

制作ノート全体はこちらです。
